※イラストはイメージです。
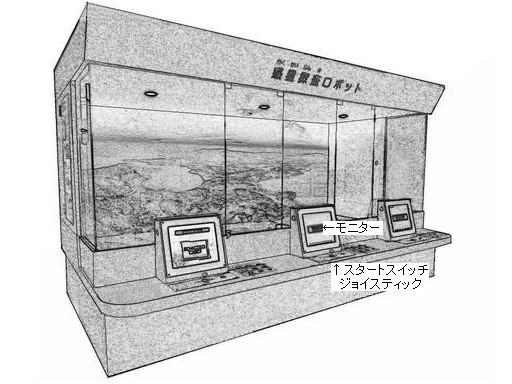
外観:W4,000約×D約2,200×H約2,450(椅子を除く)
●演出概要(展示目的)
・惑星探査ロボットの役割を、容易な操作環境による参加型展示で、楽しみながら知識欲を促します。
それらを通じて惑星探査ロボットの最先端の技術を学ぶきっかけづくりを行ないます。
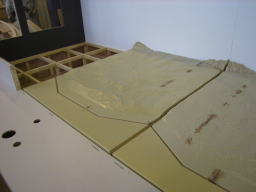
・惑星ジオラマのなかを、惑星探査ロボットをコントロールし、
他の参加者と競争しながらゲーム感覚で与えられたミッションをクリアしていきます。
●演出方法(展示方法)
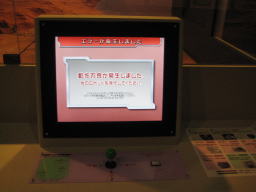
1.スタートスイッチを押します。
・モニター画面にゲーム方法とロボットの操作説明が表示されます。
2.操作説明を読んだらもう一度スタートスイッチを押します。
・ゲームスタートの表示があり、同時にカウントダウン表示が始まります。(約60?90秒)
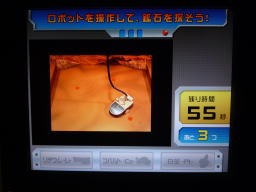
3.天井カメラのライブ映像を見ながら、ロボットをジョイスティックで、
前後(前後の動き)や左右(回転の動き)に操作し、
グラフィックで案内された位置の鉱物3個を探し出します。
4.時間内に3個の鉱物をゲットするか、タイムオーバーになると、ロボットの操作は終了します。
・「操作が終了しました。次の人に替わってください」の表示を行ない、ゲームが終了します。
●演出結果(展示効果)
・鉱物をゲットすると効果音があり、ロボットの操作は中断し鉱物の名称と写真が表示されます。(約5秒間)
表示が消えると、操作が可能になり他の鉱物を探します。
・走行中はロボットのLEDが点灯します。(停車すると消灯します)
●身の回りとの関連
・宇宙開発
・ローバー
・ロボット
・リモートコントロール(遠隔操作)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}